Serial communications
USB-C
RS-485 communications
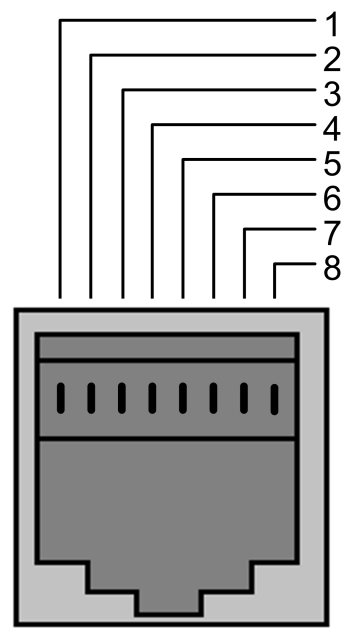
The drive has an RJ45 connector on the front of the control panel. This connector allows the user to set up a drive network via a wired connection. The connector contains two independent RS485 connections, one for Invertek’s Protocol and one for Modbus RTU. Both connections can be used simultaneously.
The electrical signal arrangement of the RJ45 connector is shown as follows:
| CAN- |
|---|---|
CAN+ | |
0 Volt | |
RS 485- PC Connection | |
RS 485+ PC Connection | |
+24 Volt Remote Keypad Power Supply | |
RS 485- Modbus RTU | |
RS 485+ Modbus RTU | |
Modbus RTU Communications
Modbus Telegram Structure
The drive supports Master / Slave Modbus RTU communications, using the 03 Read Holding Registers and 06 Write Single Holding Register commands. Many Master devices treat the first Register address as Register 0; therefore, it may be necessary to convert the Register Numbers detailed by subtracting 1 to obtain the correct Register address.
The telegram structure is as follows:-
Command 03 – Read Holding Registers | ||||||
|---|---|---|---|---|---|---|
Master Telegram | Length | Slave Response | Length | |||
Slave Address | 1 | Byte | Slave Address | 1 | Byte | |
Function Code (03) | 1 | Byte | Starting Address | 1 | Byte | |
1st Register Address | 2 | Bytes | 1st Register Value | 2 | Bytes | |
No. Of Registers | 2 | Bytes | 2nd Register Value | 2 | Bytes | |
CRC Checksum | 2 | Bytes | Etc... | |||
CRC Checksum | 2 | Bytes | ||||
Command 06 – Write Single Holding Register | ||||||
Master Telegram | Length | Slave Response | Length | |||
Slave Address | 1 | Byte | Slave Address | 1 | Byte | |
Function Code (06) | 1 | Byte | Function Code (06) | 1 | Byte | |
Register Address | 2 | Bytes | Register Address | 2 | Bytes | |
Value | 2 | Bytes | Register Value | 2 | Bytes | |
CRC Checksum | 2 | Bytes | CRC Checksum | 2 | Bytes |
Modbus Control & Monitoring Registers
The following is a list of accessible Modbus Registers available in the drive.
Registers 1 and 2 can be used to control the drive providing that Modbus RTU is selected as the primary command source (P1-01 = rtu)
Register 4 can be used to control the acceleration and deceleration rate of the drive providing that Fieldbus Ramp Control is enabled (P2-07 = 1)
Registers 6 to 24 can be read regardless of the setting of P1-01
Register Number | Upper Byte | Lower Byte | Read Write | Notes | |||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
1 | Command Control Word | R/W | Command control word used to control the drive when operating with Modbus RTU.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||
2 | Commanded Speed Reference | R/W | Speed reference sent must match the speed units which the drive has been programmed to operate in e.g. Hz, Rpm, Linear units
| ||||||||||||||||||||||||||||||||||||||||||||||||||||
3 | Commanded Torque Reference | R/W | |||||||||||||||||||||||||||||||||||||||||||||||||||||
4 | Command Ramp times | R/W | This register specifies the drive acceleration and deceleration ramp times used when Fieldbus Ramp Control is selected (P2-07 = 1) and P1-01 is set to rtu The input data range is from 0 to 60000 (0.00s to 600.00s) | ||||||||||||||||||||||||||||||||||||||||||||||||||||
5 | Internal Speed Reference | R | |||||||||||||||||||||||||||||||||||||||||||||||||||||
6 | Status Word | R |
| ||||||||||||||||||||||||||||||||||||||||||||||||||||
7 | Output Speed | R | Output speed in the units that the drive is operating in. e.g. rpm, m/s | ||||||||||||||||||||||||||||||||||||||||||||||||||||
8 | Output Current | R | Output current of the drive to one decimal place, e.g.105 = 10.5 Amps | ||||||||||||||||||||||||||||||||||||||||||||||||||||
9 | Output Torque | R | Motor output torque level to one decimal place, e.g. 474 = 47.4 % | ||||||||||||||||||||||||||||||||||||||||||||||||||||
10 | Output Power | R | Output power of the drive to two decimal places, e.g.1100 = 11.00 kW | ||||||||||||||||||||||||||||||||||||||||||||||||||||
11 | Digital Input Status | R | Represents the status of the drive inputs as per below
| ||||||||||||||||||||||||||||||||||||||||||||||||||||
12 | Drive Rating ID | R | TBC how it is displayed | ||||||||||||||||||||||||||||||||||||||||||||||||||||
13 | Drive Power Rating | R | |||||||||||||||||||||||||||||||||||||||||||||||||||||
14 | Drive Voltage Rating | R | |||||||||||||||||||||||||||||||||||||||||||||||||||||
15 | I/O Firmware | R | |||||||||||||||||||||||||||||||||||||||||||||||||||||
16 | Power Firmware | R | |||||||||||||||||||||||||||||||||||||||||||||||||||||
17 | Drive Type Code | R | |||||||||||||||||||||||||||||||||||||||||||||||||||||
18 | Active Error Code | R | Displays the current Error code. Refer to section 22.1 for a list of fault codes and diagnostic information | ||||||||||||||||||||||||||||||||||||||||||||||||||||
20 | Analog 1 Level | R | Analog Input 1 Applied Signal level in % to one decimal place, e.g. 1000 = 100.0% | ||||||||||||||||||||||||||||||||||||||||||||||||||||
21 | Analog 2 Level | R | Analog Input 2 Applied Signal level in % to one decimal place, e.g. 1000 = 100.0% | ||||||||||||||||||||||||||||||||||||||||||||||||||||
22 | Pre Ramp Speed Reference | R | Internal drive frequency setpoint | ||||||||||||||||||||||||||||||||||||||||||||||||||||
23 | DC bus voltage | R | Measured DC Bus Voltage in Volts | ||||||||||||||||||||||||||||||||||||||||||||||||||||
24 | Drive temperature | R | Measured Heatsink Temperature in °C | ||||||||||||||||||||||||||||||||||||||||||||||||||||
25 | Serial 4 | R | The values shown in these 4 registers can be merged to read the drive serial number as shown below
65940603029 | ||||||||||||||||||||||||||||||||||||||||||||||||||||
26 | Serial 3 | R | |||||||||||||||||||||||||||||||||||||||||||||||||||||
27 | Serial 2 | R | |||||||||||||||||||||||||||||||||||||||||||||||||||||
28 | Serial 1 | R | |||||||||||||||||||||||||||||||||||||||||||||||||||||
29 | Digital Output 1-3 state | R | |||||||||||||||||||||||||||||||||||||||||||||||||||||
30 | Energy Usage (kWh) | R | |||||||||||||||||||||||||||||||||||||||||||||||||||||
31 | Energy Usage (MWh) | R | |||||||||||||||||||||||||||||||||||||||||||||||||||||
36 | Run Time Since Last Enable | H:M | |||||||||||||||||||||||||||||||||||||||||||||||||||||
37 | Run Time Last Enable | s | |||||||||||||||||||||||||||||||||||||||||||||||||||||
39 | Control Board Temperature |
Modbus Parameter Access
All User Adjustable parameters are accessible by Modbus, except those that would directly affect the Modbus communications, e.g.
P2-01 Modbus Slave Address
P2-02 Modbus RTU Baud Rate
P2-03 Modbus RTU Data Format
All parameter values can be read from the drive and written to, depending on the operating mode of the drive – some parameters cannot be changed whilst the drive is enabled for example.
When accessing a drive parameter via Modbus, the Register number for the parameter is the same as the parameter number,
E.g. Parameter P1-01 = Modbus Register 101.
Modbus RTU supports sixteen bit integer values, hence where a decimal point is used in the drive parameter, the register value will be multiplied by a factor of ten,
E.g. Read Value of P1-01 = 500, therefore this is 50.0Hz.
Modbus Parameter Access of group 0 parameters.
Group 0 parameters can be accessed as per the following examples :
To read the value in parameter P0-32 (Back EMF measured value), read register 10032.
To read the value in parameter P0-38 (Last Trip 1- Newest Trip), read register 10038.
To read the value in parameter P0-38-1 (Last Trip 2), read register 11000???